Selamat datang di blog ali-mahdali.blogstpot.com, kali ini penulis memposting artikel yang berjudul Jenis-Jenis Robot yang mana artikel ini dapat kalian akses melalui alamat : https://ali-mahdali.blogspot.com/2020/09/jenis-jenis-robot.html,
tanpa basa-basi yuk disimak artikelnya dibawah ini. Selamat membaca
Berdasarkan katergorinya, suatu robot dibagi menjadi 4 jenis, yakni:
Sumber : google
-
Non-mobile Robot
Robot ini tidak dapat berpindah posisi dari satu tempat ke tempat lainnya, sehingga robot tersebut hanya dapat menggerakkan beberapa bagian dari tubuhnya dengan fungsi tertentu yang telah dirancang.
Contoh :
Robot Industri
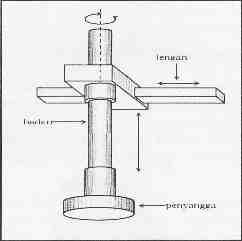
Anatomi robot industri secara umum dapat diilustrasikan seperti pada gambar dibawah ini. Robot industri yang diilustrasikan ini adalah robot tangan yang memiliki dua lengan (dilihat dari persendian), dan pergelangan. Di ujung pergelangan dapat diinstal berbagai tool sesuai dengan fungsi yang diharapkan. Jika dipandang dari sudut pergerakan maka terdiri dari tiga pergerakan utama, yaitu badan robot yang dapat berputar ke kiri dan kanan, lengan yang masing-masing dapat bergerak rotasi ke arah atas dan bawah, dan gerak pergelangan sesuai dengan sifat tool.
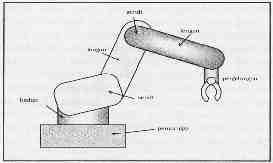
Gambar : Anatomi robot industri
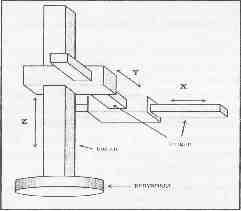
Perangkat pendukung robot industri secara umum dapat diilustrasikan dalam gambar berikut ini. Komponen utamanya terdiri dari 4 bagian, yaitu:
-
Manipulator
-
Sensor
-
Aktuator, dan
-
Kontroler
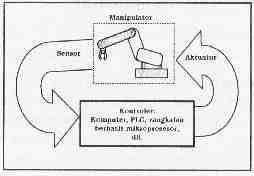
Gambar : Sistem robot industri
Manipulator adalah bagian mekanik yang dapat difungsikan untuk memindah, mengangkat, dan memanipulasi benda kerja. Sensor adalah komponen berbasis instrumentasi (pengukuran) yang berfungsi sebagai pemberi informasi tentang berbagai keadaan atau kedudukan dari bagianbagian manipulator. Output sensor dapat berupa nilai logika ataupun nilai analog. Dalam berbagai kasus dewasa ini penggunaan kamera sebagai sensor sudah menjadi lazim. Output perangkat kamera berupa citra (image) harus diubah dahulu ke besaran digital ataupun analog sesuai dengan kebutuhan. Kajian teknologi tranformasi image ke bentuk biner (nilai acuan dalam proses perhitungan komputer) ini banyak di kaji dalam konteks terpisah, yaitu pengolahan citra (image processing).
Aktuator adalah komponen bergerak yang jika dilihat dari prinsip penghasil geraknya dapat di bagi menjadi 3 bagian, yaitu penggerak berbasis motor listrik (motor DC servo, stepper moto, motor AC, dsb.), penggerak pneumatik (berbasis kompresi gas: udara, nitrogen, dsb.), dan penggerak hidrolik (berbasis kompresi benda cair:minak pelumas, dsb.).
Kontroler adalah rangkaian elektronik berbasis mikroprosesor yang berfungsi sebagai pengatur seluruh komponen dalam membentuk fungsi kerja. Tipe pengaturan yang bisa diprogramkan mulai dari prinsip pengurut (sequencer) yang bekerja sebagai open loop hingga prinsip umpan balik yang melibatkan kecerdasan buatan.
Gambar : Gambar Robot Manipulator
Konfigurasi Manipulator
Secara klasik konfigurasi robot manipulator dapat dibagi dalam 4 kelompok, yaitu polar, silindris, cartesian dan sendi-lengan (joint-arm).
-
Polar
Manipulator yang memiliki konfigurasi polar padat di ilustrasikan seperti pada gambar 1.5., badan dapat berputar ke kiri atau kanan. Sendi pada badan dapat mengangkat atau menurunkan pangkal lengan secara polar. Lengan ujung dapat digerakkan maju-mundur secara translasi. Konfigurasi ini dikenal cukup kokoh karena sambungan lengan dan gerakan maju-mundur memiliki cara yang secara mekanik sangat kokoh. Kemampuan jangkauan ke atas dan bawah kurang bagus karena badan tidak mengangkat lengan secara vertikal, namun memiliki gerakan yang khas yaitu mampu memanipulasi ruang kerja yang berbentuk bola dengan algoritma gerak yang paling sederhana dibanding tipe konfigurasi yang lain.
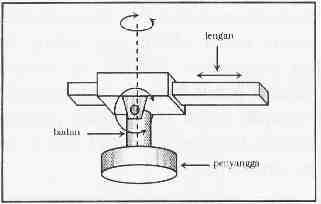
Gambar : Konfigurasi polar
-
Silinder
Konfigurasi silinder mempunyai jangkauan berbentuk ruang silinder yang lebih baik, meskipus sudut lengan terhadap garis penyangga tetap. Konfigurasi ini banyak diadopsi untuk sistem gantry atau crane karena strukturnya yang kokoh untuk tugas mengangkat beban. Pemasangan lengan ujung yang segaris dengan badan dapat lebih menguntungkan kinematiknya menjadi lebih sederhana. Selain itu struktur secara keseluruhan bisa lebih kokoh. Contoh yang mudah dijumpai adalah sistem crane yang biasa digunakan dalam pembangunan gedung-gedung bertingkat tinggi.
Gambar : Konfigurasi silinder
-
Cartesian
Manipulator berkonfigurasi Cartesian ditunjukkan dalam gambar dibawah ini. Konfigurasi ini secara relatif adalah yang paling kokoh untuk tugas mengangkat beban yang berat. Struktur ini banyak dipakai secara permanen pada instalasi pabrik, baik untuk mengangkat dan memindah barang produksi maupun untuk mengangkat peralatanperalatan berat pabrik ketika melakukan kegiatan instalasi. Crane di galangan kapal juga banyak mengadopsi struktur ini.
Gambar : Konfigurasi Cartesian
Pada aplikasi yang sesungguhnya, biasanya struktur penyangga, badan dan lengan dibuat sedemikian rupa hingga tumpuan beban merata pada struktur. Misalnya, penyanggah dipasang dari ujung ke ujung. Mekanik pengangkat di badan menggunakan sistem rantai dan sprocket atau sistem belt. Pergerakan lengan dapat menggunakan sistem seperti rel di kiri-kanan lengan.
-
Sendi-lengan
Konstruksi ini yang paling popular untuk tugas-tugas regular di dalam pabrik, terutama untuk dapat melaksanakan fungsi layaknya pekerja pabrik, seperti mengangkat barang dari konveyor, mengelas, memasang komponen mur, baut pada produk, dan sebagainya. Dengan tool pergelangan yang khusus struktur lengan-sendi ini cocok digunakan untuk menjangkau daerah kerja yang sempit dengan sudut jangkauan yang beragam.

Gambar : Konfigurasi sendi-lengan
-
Mobile Robot
Mobile dapat diartikan bergerak, sehingga robot ini dapat memindahkan dirinya dari satu tempat ke tempat lain. Robot ini merupakan robot yang paling populer dalam dunia penelitian robotika. Dari segi manfaat, robot ini diharapkan dapat membantu manusia dalam melakukan otomasi dalam transportasi, platform bergerak untuk robot industri , eksplorasi tanpa awak, dan masih banyak lagi.
Contoh :
-
Robot Line Tracker
Robot line tracker merupakan robot yang dapat bergerak mengikuti track berupa garis hitam setebal ±3 cm. Untuk membaca garis, robot dilengkapi dengan sensor proximity yang dapat membedakan antara garis hitam dengan lantai putih. Sensor proximity ini dapat dikalibrasi untuk menyesuaikan pembacaan sensor terhadap kondisi pencahayaan ruangan. Sehingga pembacaan sensor selalu akurat.
Agar pergerakan robot menjadi lebih halus, maka kecepatan robot diatur sesuai dengan kondisi pembacaan sensor proximity. Jika posisi robot menyimpang dari garis, maka robot akan melambat. Namun jika robot tepat berada diatas garis, maka robot akan bergerak cepat. Robot juga dapat kembali ke garis pada saat robot terlepas sama sekali dari garis. Hal ini bisa dilakukan karena robot selalu mengingat kondisi terakhir pembacaan sensor. Jika terakhir kondisinya adalah disebelah kiri garis, maka robot akan bergerak ke kanan, demikian pula sebaliknya.
-
Flying Robot (Robot Terbang)
Robot yang mampu terbang, robot ini menyerupai pesawat model yang diprogram khusus untuk memonitor keadaan di tanah dari atas, dan juga untuk meneruskan komunikasi.
Gambar : Contoh Flying Robot (Robot Terbang)
-
Under Water Robot (Robot dalam air)
Robot ini digunakan di bawah laut untuk memonitor kondisi bawah laut dan juga untuk mengambil sesuatu di bawah laut.
Gambar 1.10 Contoh Under Water Robot (Robot Dalam Air)
-
Kombinasi Mobile dan Non-Mobile Robot
Robot ini merupakan penggabungan dari fungsi-fungsi pada robot mobile dan non-mobile. Sehingga keduanya saling melengkapi dimana robot nonmobile dapat terbantu fungsinya dengan bergerak dari satu tempat ke tempat yang lain.

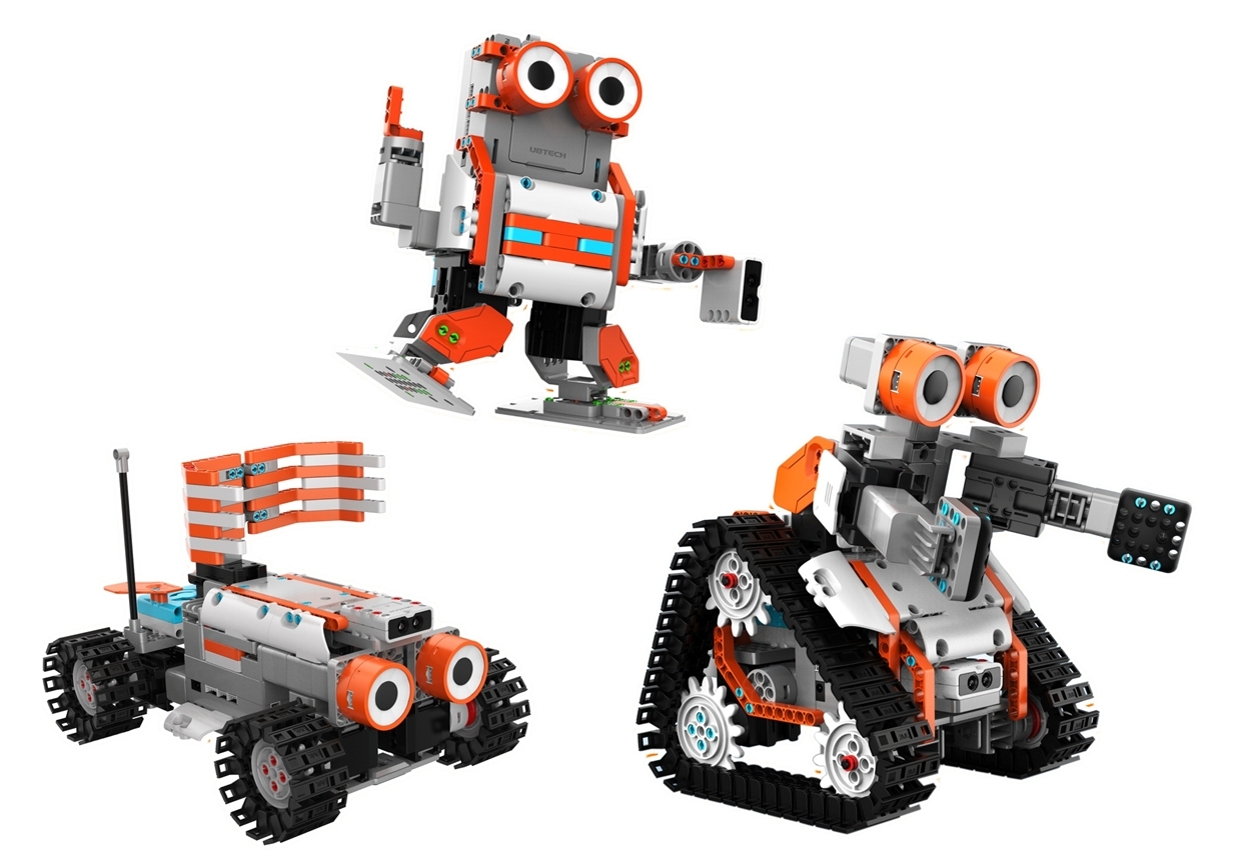
Gambar : Contoh robot kombinasi Mobile dan Non-mobile
-
Humanoid
Sebuah robot humanoid adalah robot otonom yang dapat beradaptasi dengan perubahan lingkungan atau dirinya sendiri. Ini merupakan perbedaan utama antara jenis humanoid dan jenis robot.
Dalam konteks, robot humanoid dapat mencakup, antara lain:
-
Dapat merawat dirinya sendiri (seperti pengisian sumber tenaga sendiri)
-
Dapat belajar otonom (belajar atau memiliki kemampuan baru tanpa bantuan dari luar (manusia), menyesuaikan diri berdasarkan lingkungan dan beradaptasi dengan lingkunganyang baru)
-
Dapat menghindari hal-hal yang berbahaya bagi manusia, properti, dan dirinya sendiri
-
Dapat berinteraksi dengan manusia dan lingkungan
Seperti robot mekanis lainnya, humanoid mengacu pada komponen dasar sebagai berikut : Sensing (Penginderaan), Actuating, Planning (Perencanaan) dan Controling (Pengendalian). Karena untuk mensimulasikan struktur, perilaku manusia dan sistem otonomi, sebagian besar robot humanoid lebih kompleks dibandingkan jenis robot lainnya.
Kompleksitas ini mempengaruhi semua skala robot (mekanik, ruang, waktu, sistem dan kompleksitas komputasi), tetapi lebih terlihat pada densitas daya dan skala kompleksitas sistem. Hal pertama, robot humanoid tidak cukup kuat bahkan untuk melompat dan ini terjadi karena kekuatan atau perbandingan berat tidak sebaik seperti tubuh manusia. Ada algoritma yang sangat baik untuk beberapa bidang konstruksi robot humanoid, tapi sangat sulit untuk menggabungkan semuanya menjadi satu sistem yang efisien (sistem kompleksitas sangat tinggi).

Gambar : TOSY TOPIO, robot humanoid yang dapat main ping pong
Robot humanoid diciptakan untuk meniru beberapa tugas fisik dan mental yang sama seperti manusia menjalani kehidupan setiap harinya. Para ilmuwan dan spesialis dari berbagai bidang termasuk teknik , ilmu kognitif , dan linguistik menggabungkan upaya mereka untuk menciptakan robot yang mirip dengan manusia. Tujuan ilmuwan dan spesialis menciptakan robot humanoid adalah agar robot humanoid dapat memahami kecerdasan akal manusia dan bertindak layaknya seperti manusia. Jika robot humanoid mampu melakukannya, mereka akhirnya bisa bekerja dalam kohesi dengan manusia untuk menciptakan masa depan yang lebih produktif dan berkualitas tinggi. Manfaat lain yang penting untuk mengembangkan robot humanoid adalah untuk memahami tubuh manusia biologis dan proses mental, dari yang sederhana hingga yang berjalan dengan konsep kesadaran dan spiritualitas.
Dalam perencanaan dan pengendalian antara robot humanoid dengan robot jenis lain (seperti robot industri) memiliki perbedaan yaitu bahwa gerakan robot harus menyerupai manusia, dengan menggunakan penggerak berkaki, terutama biped kiprah. Perencanaan ideal untuk gerakan robot humanoid saat berjalan normal harus menghasilkan konsumsi energi minimum, seperti seperti halnya tubuh manusia. Untuk alasan ini, studi tentang dinamika dan kontrol dari jenis struktur menjadi lebih penting.
Untuk menjaga keseimbangan dinamis selama berjalan, robot membutuhkan informasi tentang gaya kontak saat ini dan gerakannya yang diinginkan. Solusi untuk masalah ini bergantung pada konsep utama, Zero Moment Point (ZMP).
Karakteristik lain tentang robot humanoid adalah bahwa mereka bergerak, mengumpulkan informasi (menggunakan sensor) pada "dunia nyata" dan berinteraksi dengan itu, mereka tidak tinggal tetap seperti manipulator pabrik dan robot lain yang bekerja di lingkungan yang sangat terstruktur. Perencanaan dan Pengendalian harus fokus tentang deteksi self-collision, perencanaan jalur dan penghindaran rintangan untuk memungkinkan humanoids untuk bergerak dalam lingkungan yang kompleks.
Ada fitur dalam tubuh manusia yang belum dapat ditemukan di robot humanoid. Mereka mencakup struktur dengan fleksibilitas variabel, yang memberikan keselamatan (untuk robot itu sendiri dan kepada orang-orang), dan redundansi gerakan, yaitu lebih derajat kebebasan dan karena itu ketersediaan tugas lebar. Meskipun karakteristik ini diinginkan untuk robot humanoid, mereka akan membawa kerumitan yang lebih dan masalah baru untuk perencanaan dan kontrol.
Terimakasih atas kunjungan Anda dan Karena telah sudi membaca artikel yang berjudul Jenis-Jenis Robot.Tak Lengkap Rasanya Jika Kunjungan Anda di Blog ini Tanpa Meninggalkan Komentar, untuk Itu Silahkan Berikan Kritik dan saran Pada Kotak Komentar di bawah. Anda boleh menyebarluaskan atau mengcopy artikel Jenis-Jenis Robot ini jika memang bermanfaat bagi anda, namun jangan lupa untuk mencantumkan link sumbernya. Terima Kasih, Happy Blogging :)




{kind=link}
EmoticonEmoticon